My dissertation supervisor also owns a GoPro, and suggested to me what he had done previously: Reshape the GoPro mount that holds the GoPro in it’s box upon purchase. We checked to see if the plate would fit on the UAV, and found that it did:

We then cut it to shape using a band saw:

We used glass fiber tape to attach the mount. This required wrapping the area in the tape, as the tape sticks well to itself but not the EPP frame. We had considered using the glass fiber tape to reinforce the UAV’s frame, but this seems less likely to happen considering how poorly it adheres. We were then able to attach the GoPro:
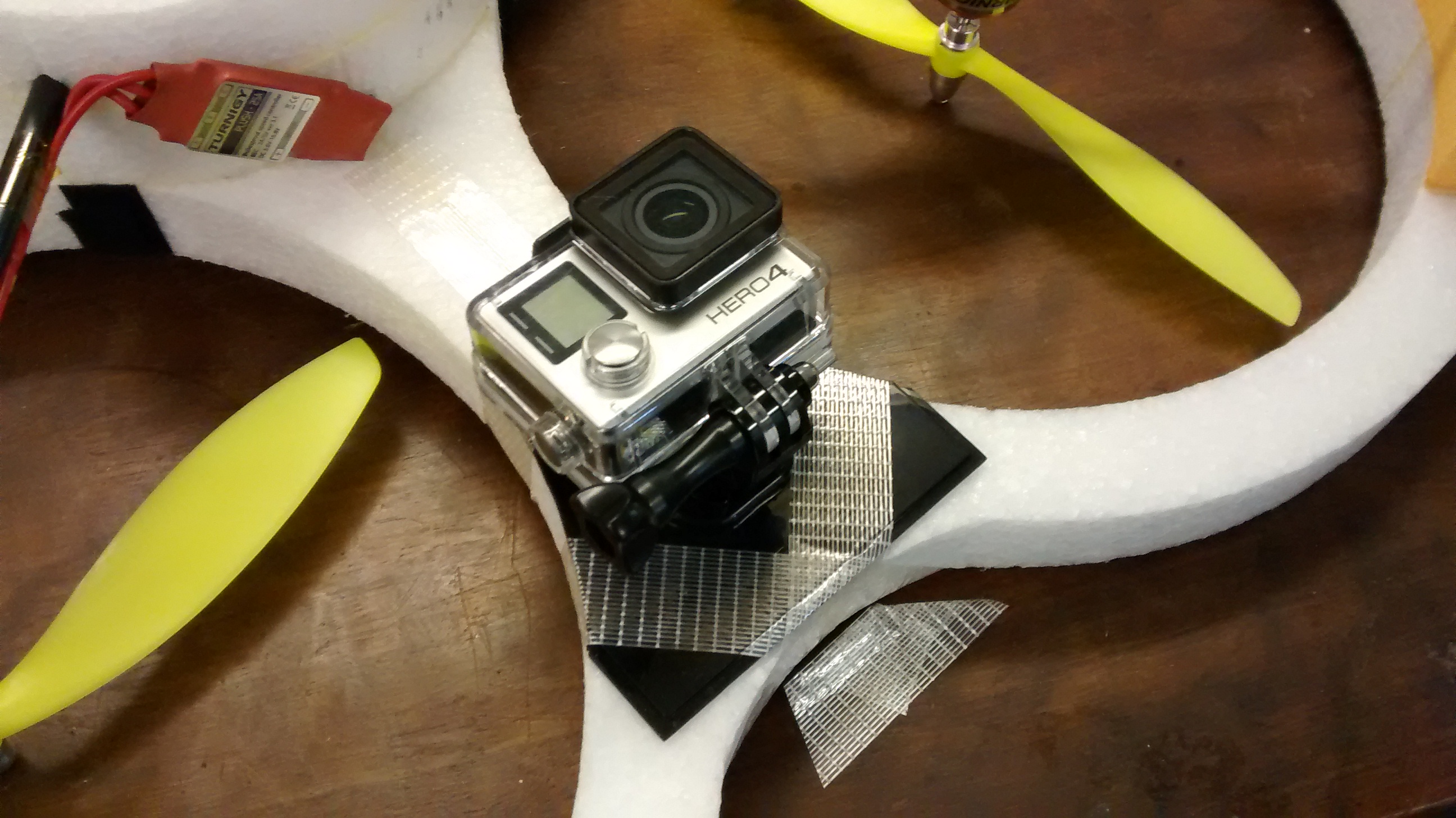

The GoPro just about fits on the underside when it is facing down. The screen just about touches the ground when the UAV lands, and so careful landing is required. Alternatively, we may add more wedges to the “feet” to hold the GoPro off of the ground. We would require quite a boost for the GoPro to not touch the ground when it is facing as it is in the second picture. This positioning also causes video to be upside-down, but Youtube has the facilities to rotate videos. We have had to move where the battery is located so that it balances the weight of the GoPro.
I was able to connect my phone to the GoPro before flight to control it. The UAV did not have to fly very far to be out of signal range however, so it would probably be best to leave the GoPro recording for the entire flight. I was able to take photographs in both positions:


We additionally took some video:
You can hear in these videos that the motors are fighting quite hard. Some time will probably have to be spent adjusting the PID values to account for the increased weight.
I use Arducopter and have built a number of multirotor craft. Be careful about the position of the gopro with regards to overall craft balance. If you enable motor logging for the dataflash logs on the apm, you can plot rcouts 1,2,3,4 to check the pwm signals being sent to each motor. I have been down some of the same roads with regard to altitude hold accuracy. Arducopter uses both the pressure readings and z-axis acceleration to estimate the vertical velocity. That makes it important that the flight controller vibrations are minimal. Your project is an interesting use of uavs. I am designing them for farming applications. The baro pressure sensor gains altitude as it warms up so it is a good idea to leave the apm on for few minutes prior to arming the motors — which sets ground reference.