Aide memoir for starting up SITL:
-Launch Virtualbox software (but do not launch the actual VM. I have found that if you manually launch it then it does not seem to initialise correctly)
-Use the “vagrant up” command (http://dev.ardupilot.com/wiki/simulation-2/sitl-simulator-software-in-the-loop/setting-up-sitl-using-vagrant/#set_up_the_vagrant_and_the_virtual_machine) to start the VM
-Use Putty to connect to the VM
-Use MAVProxy/Mission Planner to connect
I have found that starting MAVProxy then trying to connect causes issues, but starting MAVProxy using the command “python mavproxy.py –master=127.0.0.1:14550” (http://dev.ardupilot.com/wiki/simulation-2/sitl-simulator-software-in-the-loop/setting-up-sitl-using-vagrant/#set_up_the_vagrant_and_the_virtual_machine) connects fine. It is interesting to note that a MAVProxy guide document contains a dedicated command for connecting to SITL (http://tridge.github.io/MAVProxy/starting.html). At this time I am unsure if I will need to use this command, as the regular connection seems to work.
Using MAVProxy, I can use the “param show” command (http://dev.ardupilot.com/wiki/simulation-2/sitl-simulator-software-in-the-loop/using-sitl-for-ardupilot-testing/) to view the various settings on this virtual UAV. I can also set them. Mission Planner allows me to export/save a list of parameters from a connected UAV, so it could be useful to pull a list of all paramteres on my UAV and see if I can feed them in to the simulator. There is also a set of simulator specific variables, which can be seen below: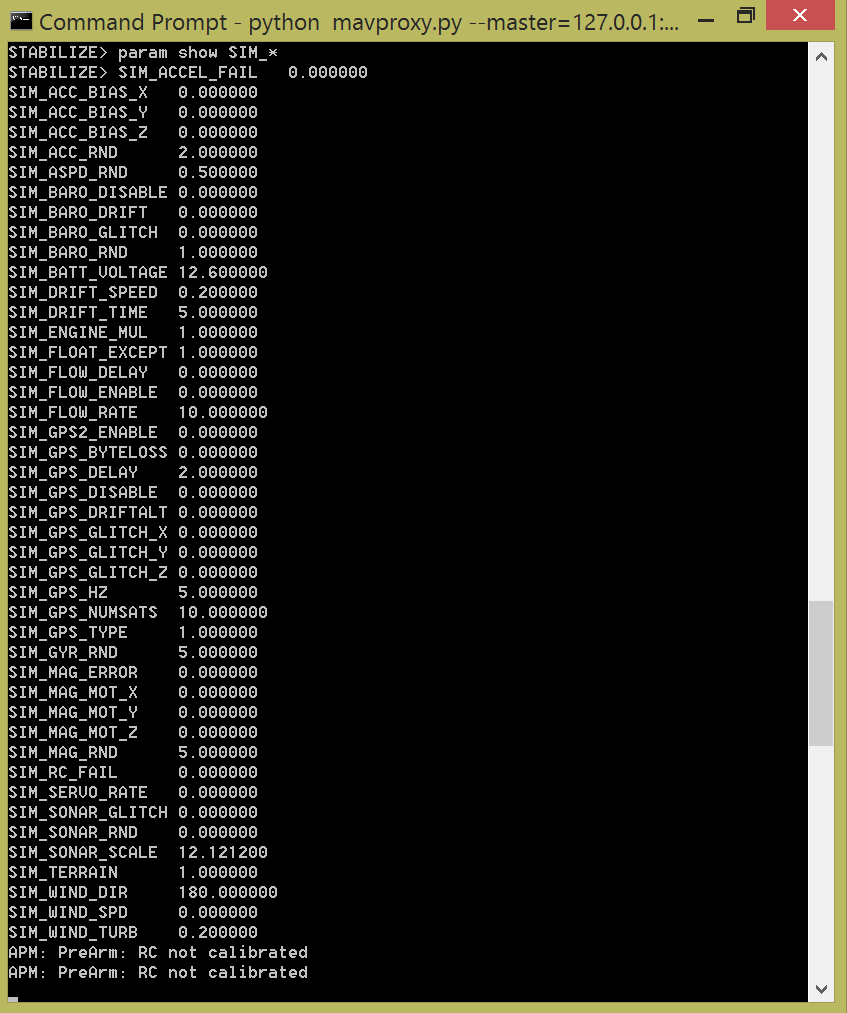 This suggests that you can manually set things such as the simulated wind speed for testing, which could be useful for working out the operating conditions of my UAV. You can also use these variables to simulate occurances such as losing RC control/signal.
This suggests that you can manually set things such as the simulated wind speed for testing, which could be useful for working out the operating conditions of my UAV. You can also use these variables to simulate occurances such as losing RC control/signal.
I tried running the param load command (http://tridge.github.io/MAVProxy/parameters.html) to load in the set of parameters around my UAV, which I had previously saved via Mission Planner. The majority of the parameters loaded correctly, but there were still a few errors:
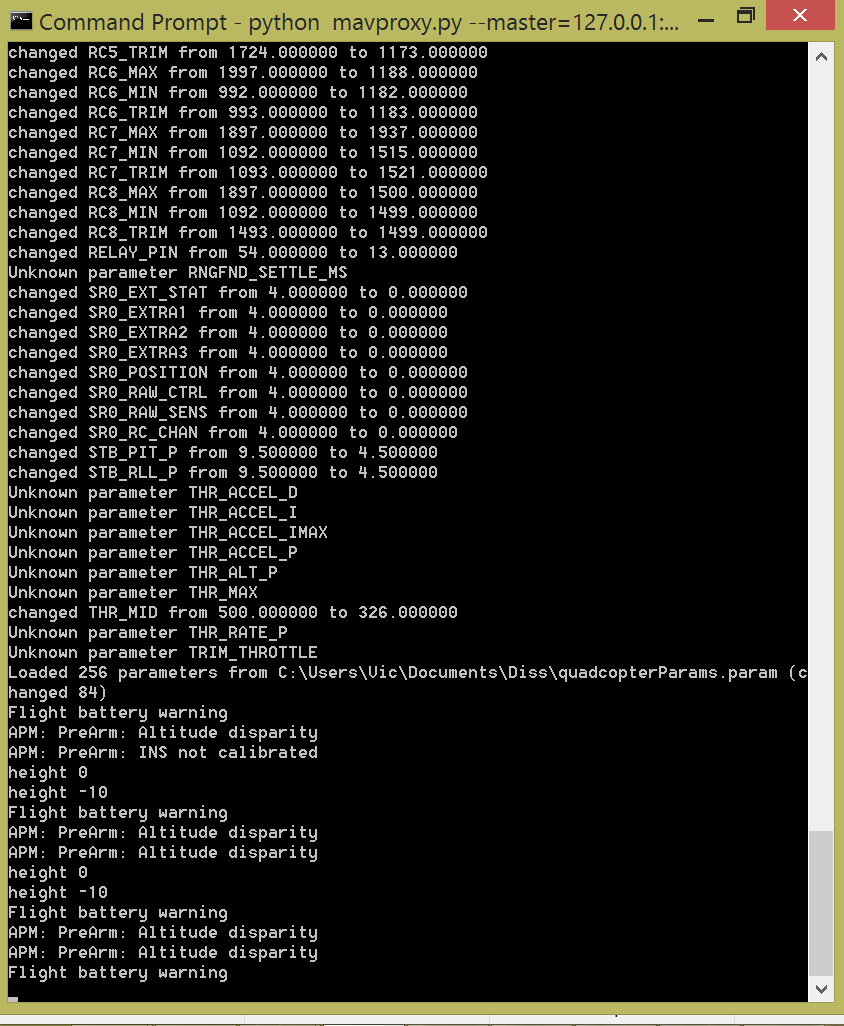
It seems odd to me that the control PID values would be unknown. The RC trim values seem to be loading correctly, and so I don’t see why the software would not want to take the control PID values.
I have also had a little look at waypoints, as I can load waypoints in to MAVProxy. I decided that it would be easier to create a set of waypoints using Mission Planner (since it has a map that I can use to confirm the locations). From looking at Google Maps, the field in which I test has the co-ordinates of around 52.415682, -4.068020. I have created a basic flight plan based around said field. It can be seen here:
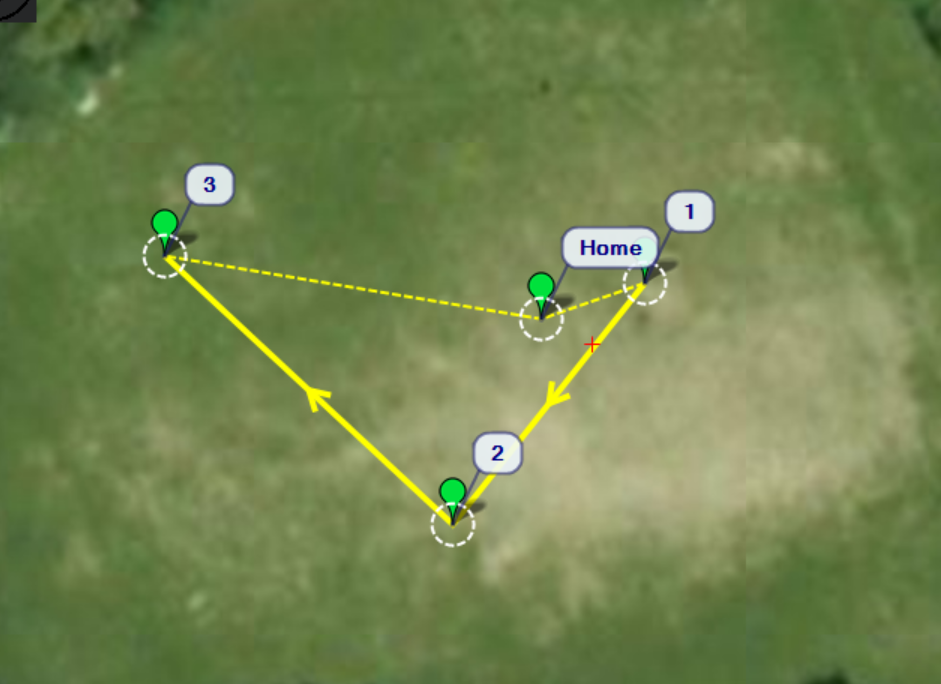
Hopefully I will be able to test today.
Be First to Comment